
Os seres humanos geralmente têm muito orgulho de seu polegar opositor, o que lhes dá uma agradável sensação de superioridade sobre outras espécies. Só que o princípio tem limites. De qualquer forma, uma equipe de pesquisadores em engenharia mecânica e robótica da Escola Politécnica Federal de Lausanne (EPFL, Suíça) partiu dessa observação para projetar uma mão robótica muito mais habilidosa do que uma mão humana.
O projeto é detalhado em artigo de Natureza em janeiro de 2026. É constituída por uma estrutura redonda que funciona como palma e em torno da qual se dispõem quatro, cinco ou seis dedos de tamanhos idênticos, sendo a extremidade da última falange recoberta por uma ponta de silicone que garante uma preensão eficaz.
Opostos entre si
Primeiro, em vez de serem todos oponíveis ao polegar, esses dedos são capazes de girar de modo que sejam todos oponíveis entre si, como pode ser visto desde o início de lá vídeo de demonstração abaixo.
Em seguida, as juntas dos dedos são reversíveis, permitindo o movimento do dedo 90 graus em uma direção e 90 graus na outra. Ou seja, os dedos podem dobrar-se perfeitamente simetricamente abaixo ou acima da palma (que na verdade é a palma e o dorso da mão).
Resultado: esta mão robótica pode realizar diversas ações de preensão simultâneas usando vários conjuntos de dedos de forma independente, do mesmo lado ou de ambos os lados da palma. Um ser humano precisaria de ambas as mãos ou de pegar sucessivamente um objeto e depois outro.
Leia tambémEste robô humanóide pode mudar de tamanho inflando seus “ossos”
Limitações do braço humano
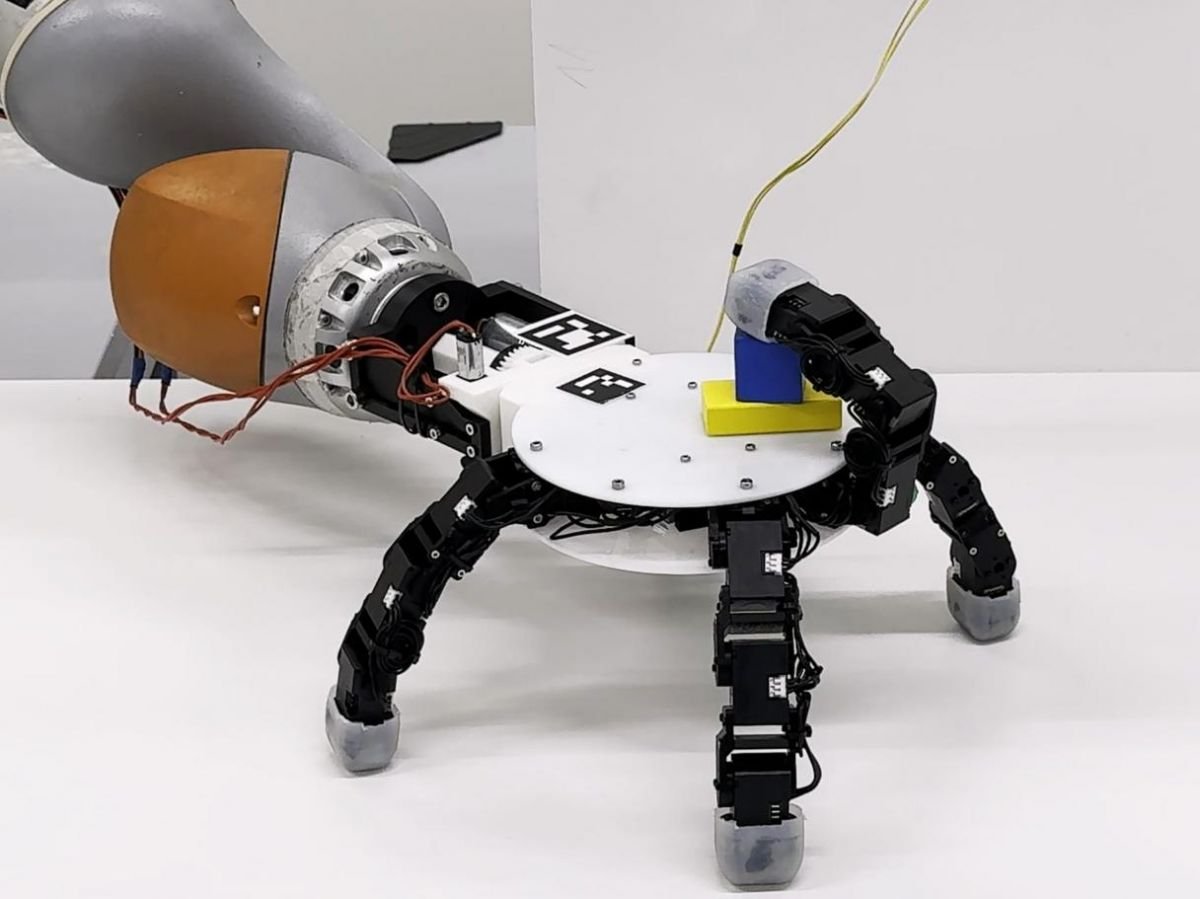
Mas o projeto não para por aí. “A mão está presa à extremidade do braço, o que restringe a sua mobilidade e limita o espaço a que pode aceder”explica a equipe da EPFL em seu artigo de pesquisa. É por isso que, por exemplo, nem sempre é fácil encontrar objetos debaixo de um móvel. O ideal seria ter uma mão destacável que pudesse ir onde quiser… E foi exatamente isso que os pesquisadores desenvolveram!
Sua mão robótica pode se separar do braço articulado que termina. Ele cai no chão e os dedos se dobram e acionam para permitir que ele se mova. Os pesquisadores se inspiraram em animais como o polvo, que usa os braços tanto para pegar conchas quanto para se movimentar no fundo do mar. Da mesma forma, os dedos da mão assumem a aparência de pernas de aranha para agarrar um objeto na ponta e voltar para prendê-lo ao braço.
Leia tambémAqui está o menor robô autônomo do mundo
Prótese potencial
Os limites estabelecidos para uma mão humana são de facto válidos para um robô industrial: um sistema preênsil também é limitado pelo facto de estar ligado a um braço articulado e pelo seu raio de acção. O novo conceito da EPFL poderia, portanto, ser aplicado em máquinas de fábrica, em armazéns.
Mas a equipe vê ainda outra utilidade, como diz o artigo: “Mesmo que esta mão robótica não seja antropomórfica, não excluímos uma potencial adaptação para servir como prótese. Além disso, seu design oferece possibilidades para aplicações de membros aumentados.”