
Se todo um campo da robótica se inspira em princípios observados em plantas ou animais, o que chamamos de biomimética, projeto da Escola Politécnica Federal de Lausanne (EPFL) apresentado na revista Ciência Avançadavai um passo além. Na verdade, incorpora componentes retirados de lagostins reais para fazer uma pinça ou um dispositivo de elevação!
O sistema experimental foi projetado pelo Laboratório de Design e Fabricação de Robôs Computacionais (CREATE) da EPFL e os componentes em questão são justamente os exoesqueletos de crustáceos, o que comumente é chamado de carapaça.
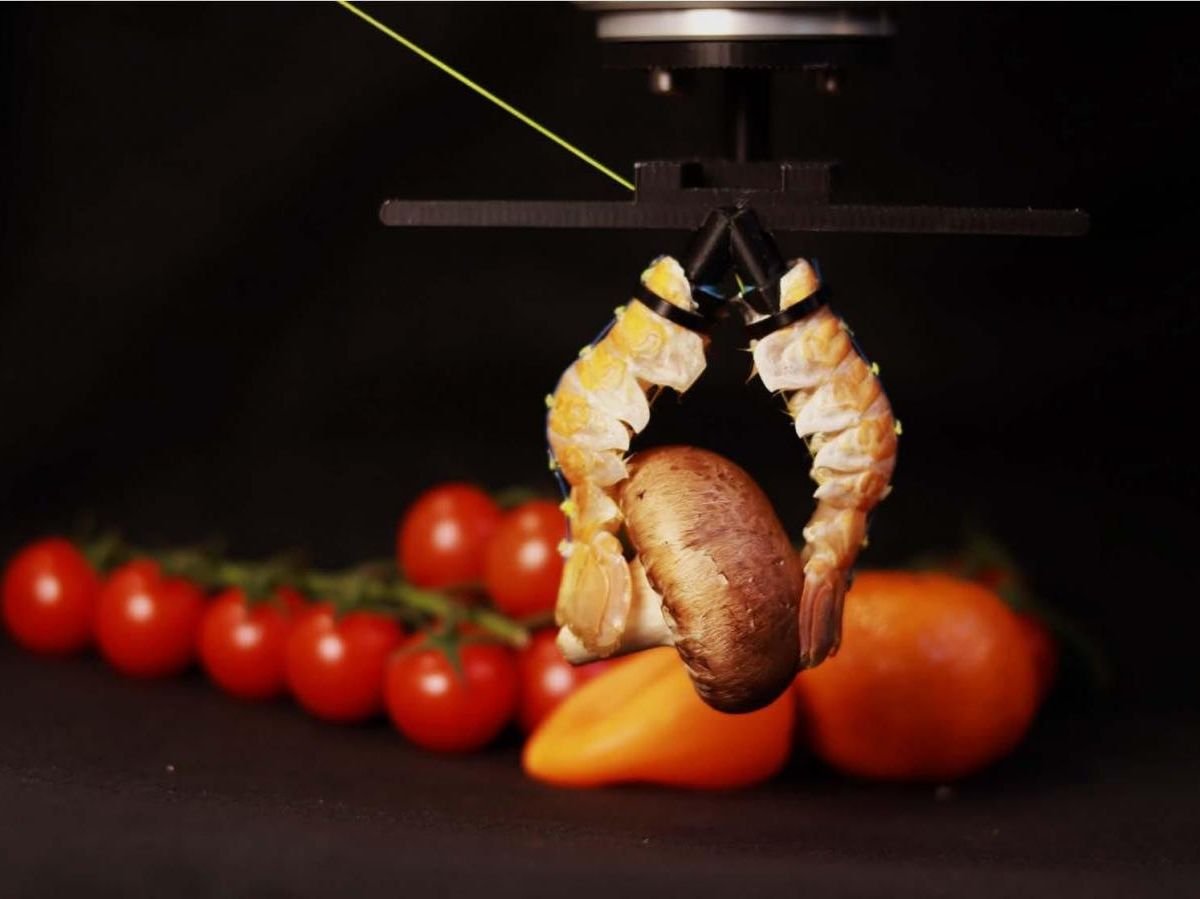
Seis segmentos articulados rígidos
A equipe usou lagostins congelados comprados em lojas. Ela os mergulhou em água fervente antes de retirar a polpa e limpar as cascas. Mais precisamente, os pesquisadores pegaram a parte correspondente ao abdômen, entre o cefalotórax e a cauda. É composto por seis segmentos rígidos constituídos principalmente por quitina mineralizada, interligados por uma membrana flexível que permite a articulação de toda a estrutura.
No animal vivo, são obviamente os músculos do abdômen que controlam as flexões e extensões desta carapaça. Mas uma vez vazio e inerte, deve ser animado por outro mecanismo. Os pesquisadores, portanto, colocaram um tendão de elastômero ao longo de toda a linha dorsal da estrutura. Tudo foi então coberto com uma película protetora de silicone.
O projeto deu origem, na verdade, a três aplicações, montadas em um sistema motorizado cuja função consiste em esticar e relaxar o elastômero. Uma pinça, portanto, composta por dois exoesqueletos frente a frente, e capaz de levantar um objeto de 500 gramas; um atuador que pode capturar objetos e observar batimentos a uma velocidade de 8 hertz; um robô nadador, que se move a uma velocidade de 11 cm por segundo graças ao batimento sincronizado de, novamente, dois exoesqueletos.
Leia tambémUm elefante robô flexível e rígido graças a uma estrutura inovadora
Problema de variabilidade natural
Resta que este tipo de sistema depende da variabilidade natural dos organismos utilizados: dois exoesqueletos de lagostins não têm a mesma morfologia e, portanto, não se dobram exatamente da mesma maneira, com a mesma amplitude. Tanto que os movimentos dos dois dedos da pinça ou das duas nadadeiras do robô nadador não são simétricos.
Mas cobrir a estrutura com silicone permite que seu uso se estenda para além de algumas horas ou alguns dias, como é o caso da maioria dos outros projetos de robótica bio-híbrida. O projeto também demonstra certa versatilidade, com três aplicações obtidas a partir do mesmo componente. Tantos bens que faltam a aranha-gancho da Universidade Rice (Estados Unidos) ou o esqueleto de lagarto usado pela Universidade de Edimburgo (Grã-Bretanha).